KinematicUnitPlugin
This widget shows position and velocity of all joints. Optionally a 3d robot model can be visualized.
When you add the widget to the Gui, you need to specify the following parameters:
| Parameter Name | Example Value | Required? | Description |
|---|---|---|---|
| Robot model filepath | $ArmarX_Core/Armar3/data/Armar3/robotmodel/ArmarIII.xml | Yes | The robot model to use. This needs to be the same model the kinematic unit is using. |
| Robot nodeset name | Robot | Yes | ? |
| Kinematic unit name - Proxy | Armar3KinematicUnit | Yes | The kinematic unit you wish to observe/control. |
| RobotState Topic Name | RobotState | ? | ? |
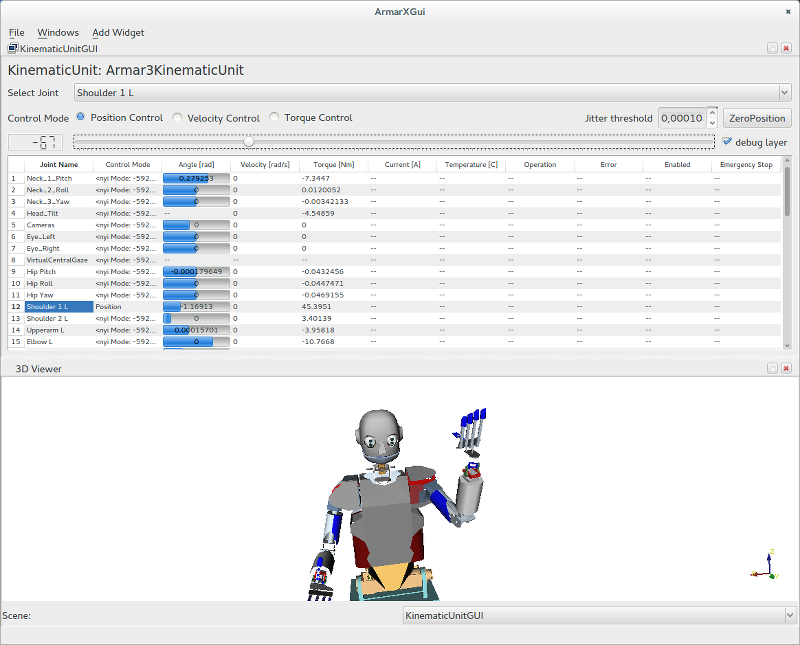
This widget allows you to both observe and control a kinematic unit. All joints are listed in the table in the center of the widget. The 3D viewer shows the current state of the robot.
On the top you can select the joint you wish to control and the control mode. You can control a joint with the slider below.
