"The RobotIK Gui Plugin"
The RobotIK Gui Plugin can be used for IK computation.
This gui plugin can be used for Cartesian control of a robot (arm). It connects to the KinemticUnit of the robot in order to execute the computed configurations via position control. Via the plugin the kinematic chain of the robot can be specified allowing to move different end effectors with varying subsets of the robot's joints.
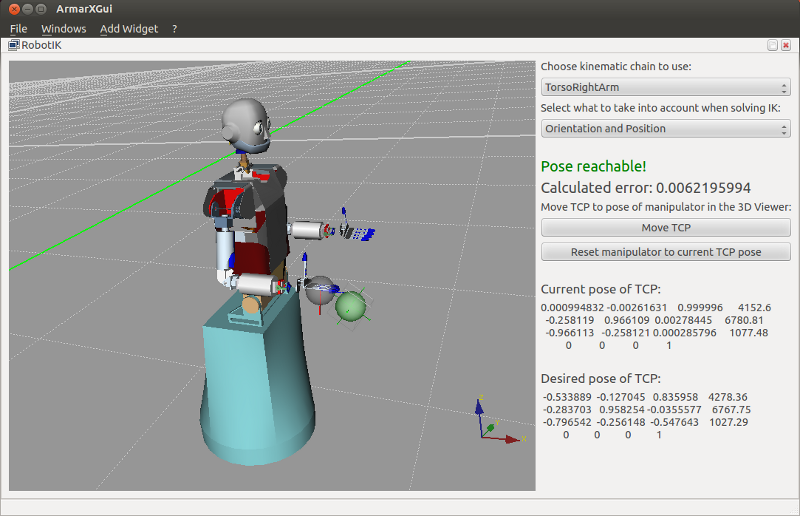
The RobotIK Gui Plugin is used to move the right end effector of Armar-III.
Demonstration video of the RobotIK Gui:
