The SimoxCSpaceVisualizer allows to visualize any armarx::SimoxCSpace used by a planning task on the configurated armarx::MotionPlanningServer
Tasks to load are displayed in the top left corner. You can select one and load it.
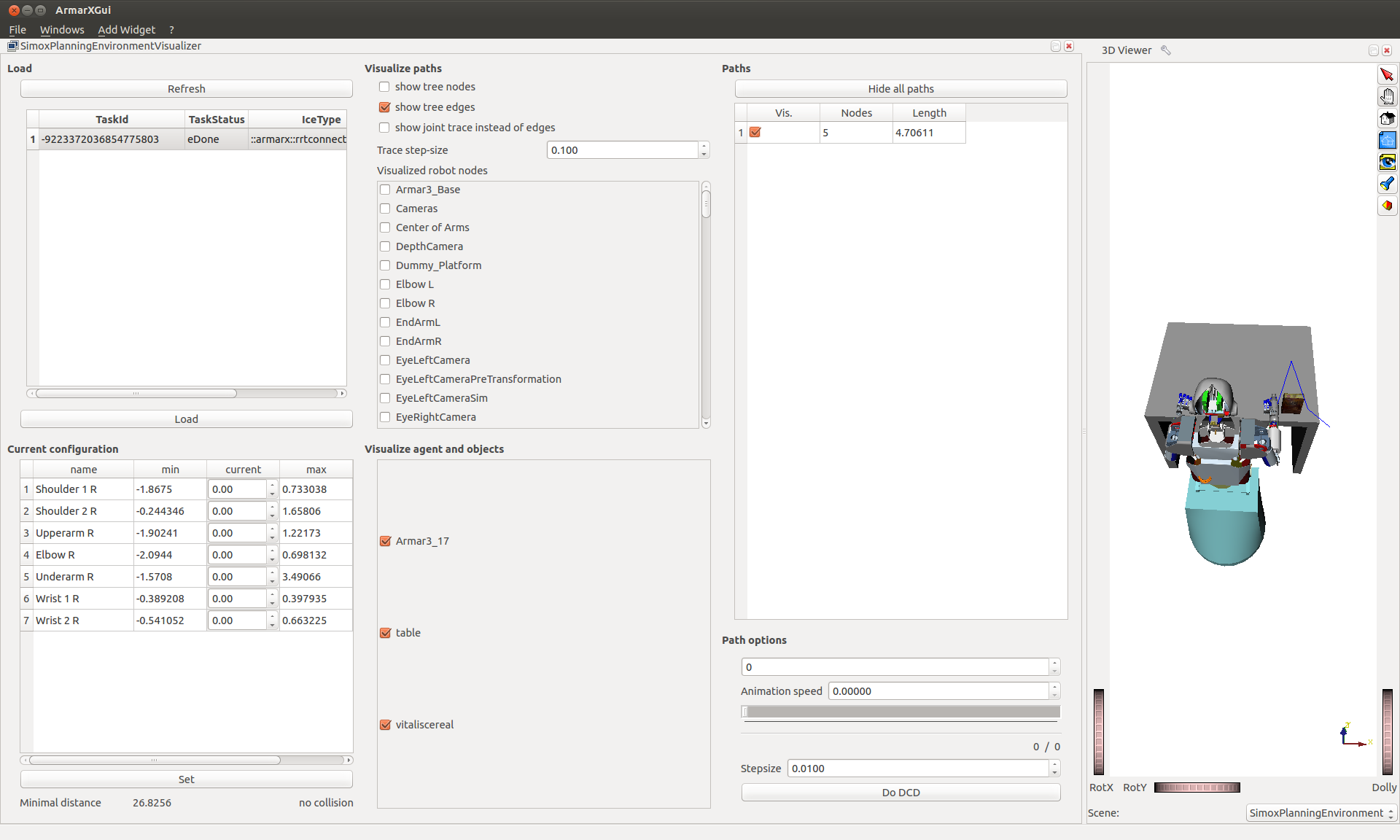
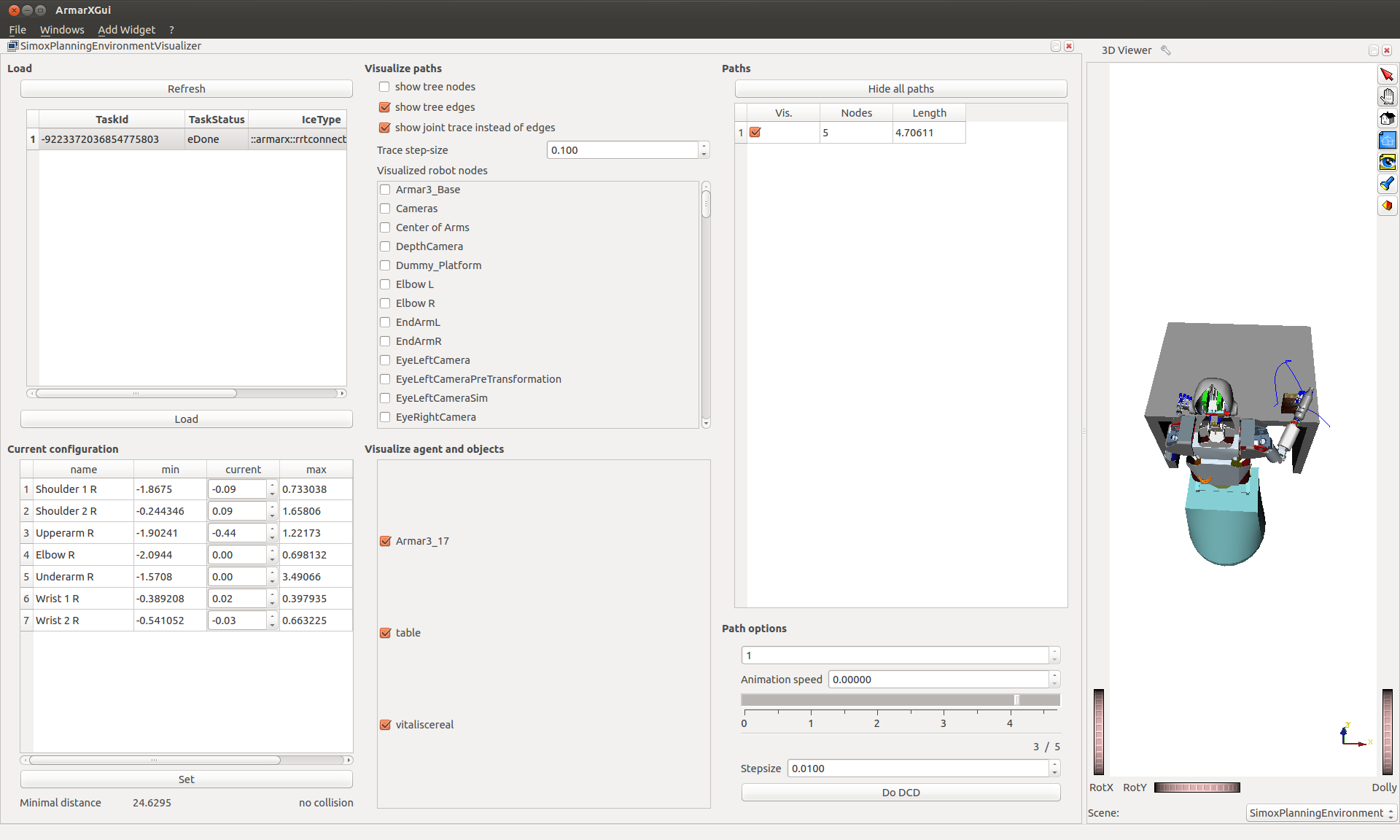
Once loaded the bottom left shows all dimensions used for planning, their bounds and current value displayed in the 3D Viewer. The 3D Viewer shows all objects, the agent and draws found paths. The paths are visualized for the tcp of the kinematic chain used for planning. The path consits of the tcp's poses for each node in the path and lines connecting them.
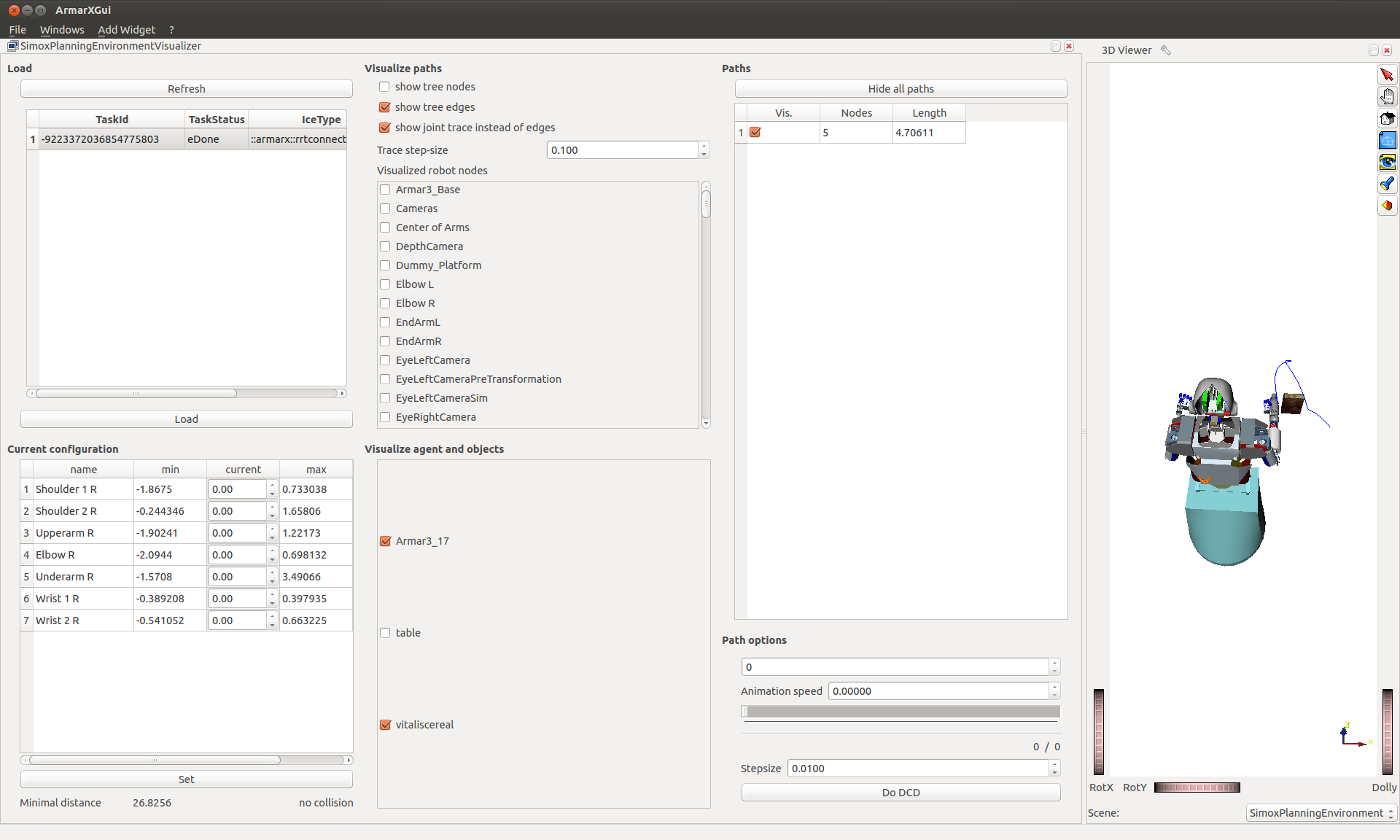
To hide an object or the agent, uncheck its box in the bottom mid list.
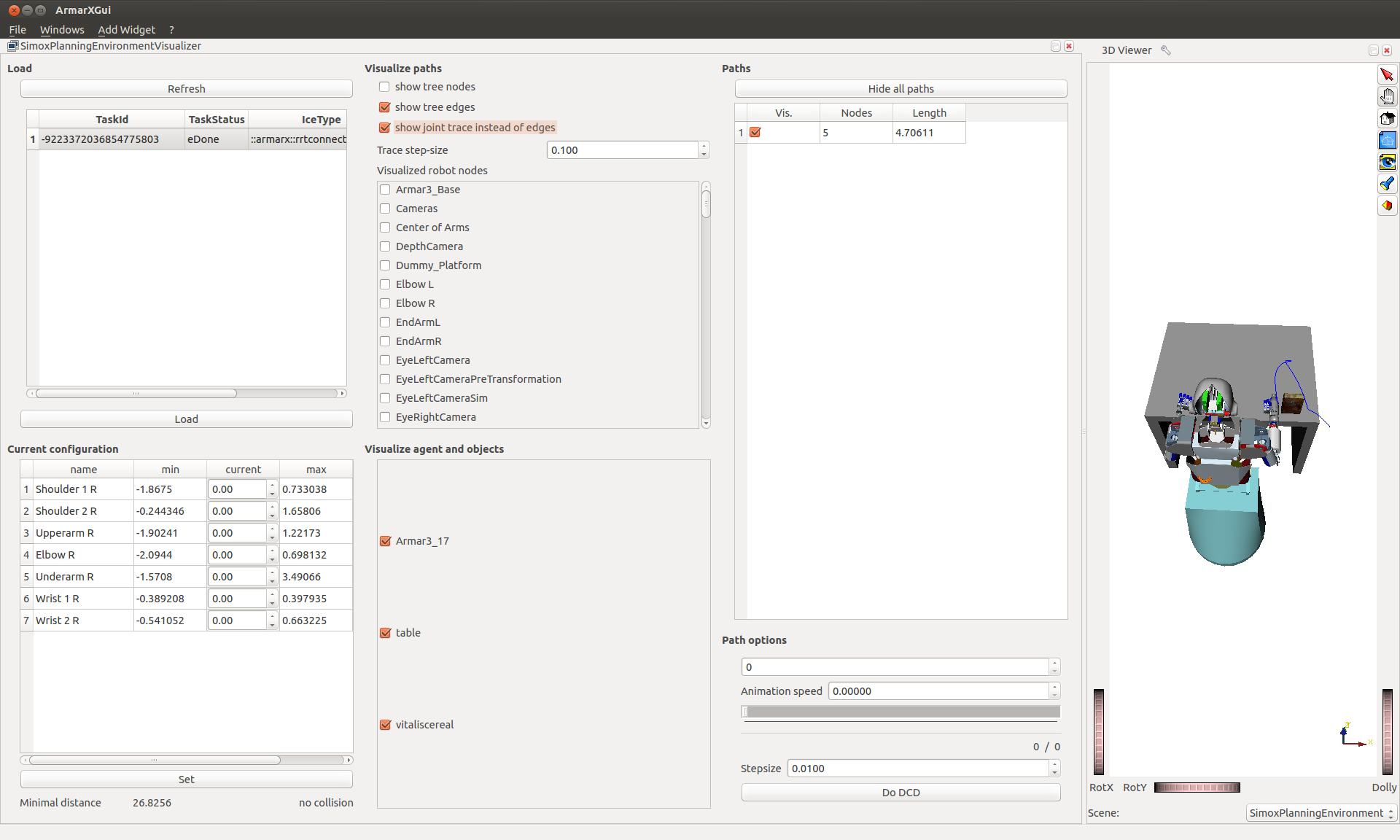
To display the trace of the movement along the path (instead of lines connecting the nodes), check the box "show joint traces instead of edges" in the top mid.
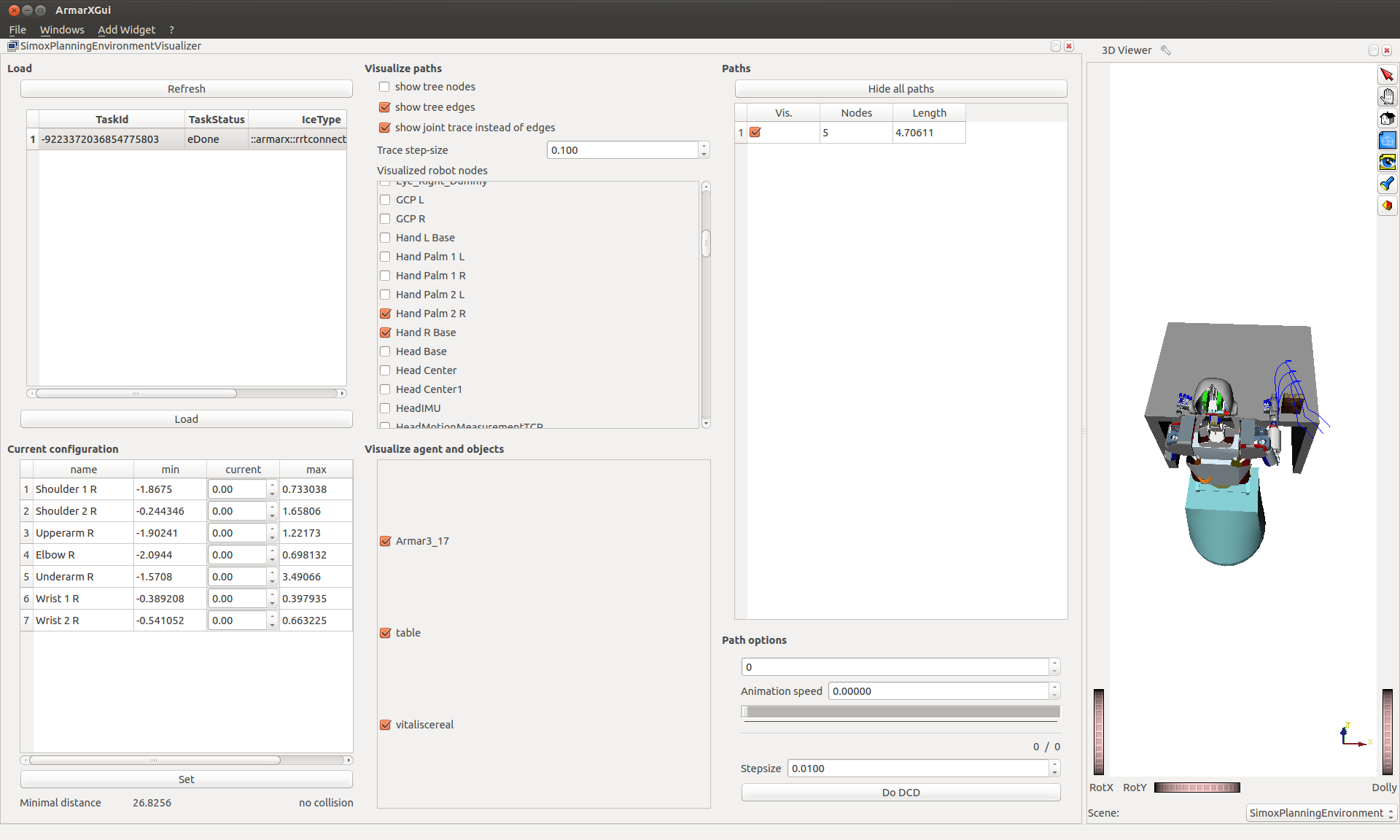
To display the path for other joints, simply select them from the list int the top mid.
To play back the motion, select the path in the bottom right and move the slider. You can play it back by setting some value in the spin box "Animation speed".
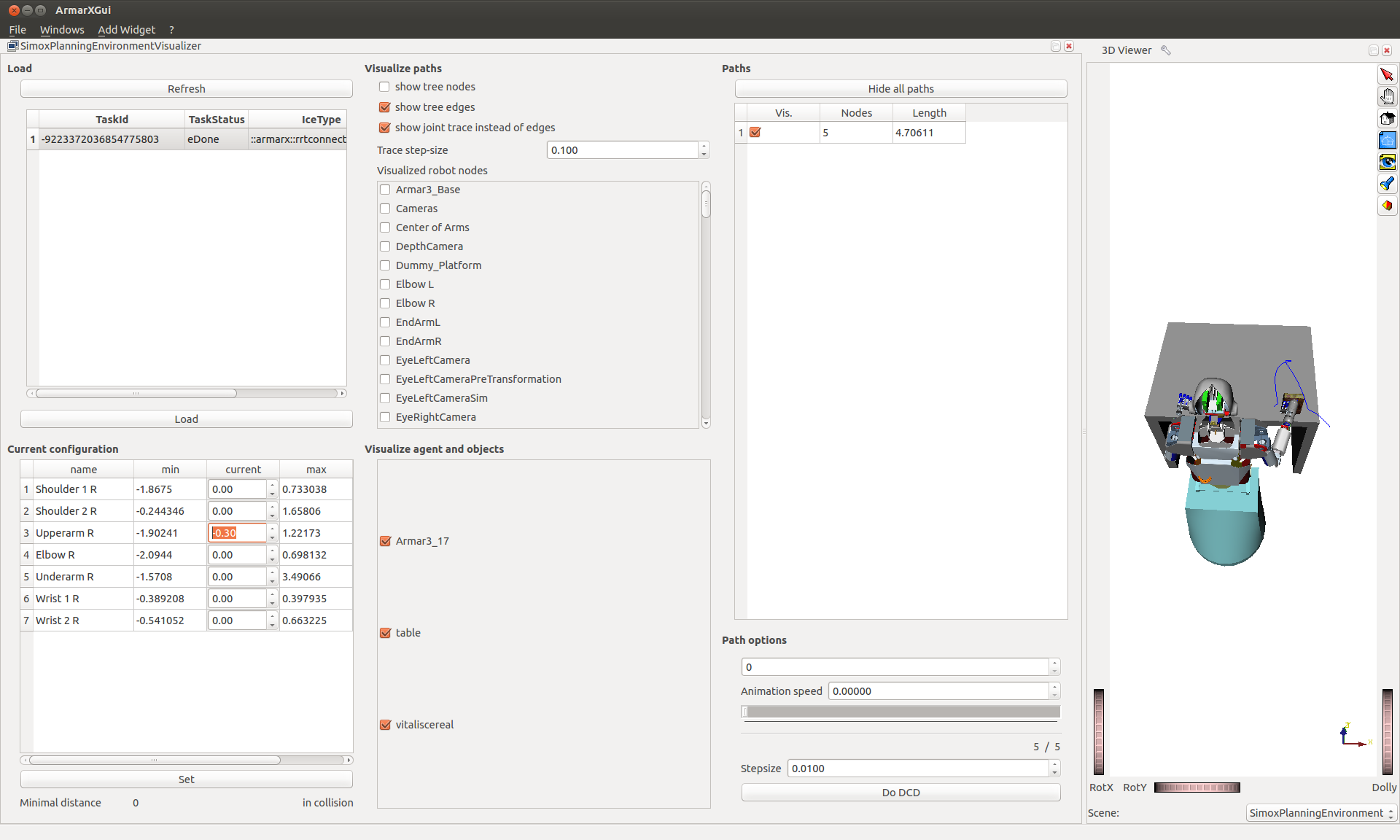
To set a pose, edit the joint values in the bottom left.
