AStarPathPlanner
The AStarPathPlanner provides path planning using the A* algorithm. More...
Classes | |
| class | AStarPathPlanner |
| The AStarPathPlanner class. More... | |
Detailed Description
The AStarPathPlanner provides path planning using the A* algorithm.
With this component collision-free paths can be planned using the armarx::PathPlanner interface. You can specify several parameters and the envrionment via convenient methods. The paths are encoded as sequence of 3D points consisting of X/Y positions (mm) and an orientation (rad) arounf the z axis. An exemplary path that has been planned with this component can be seen below.
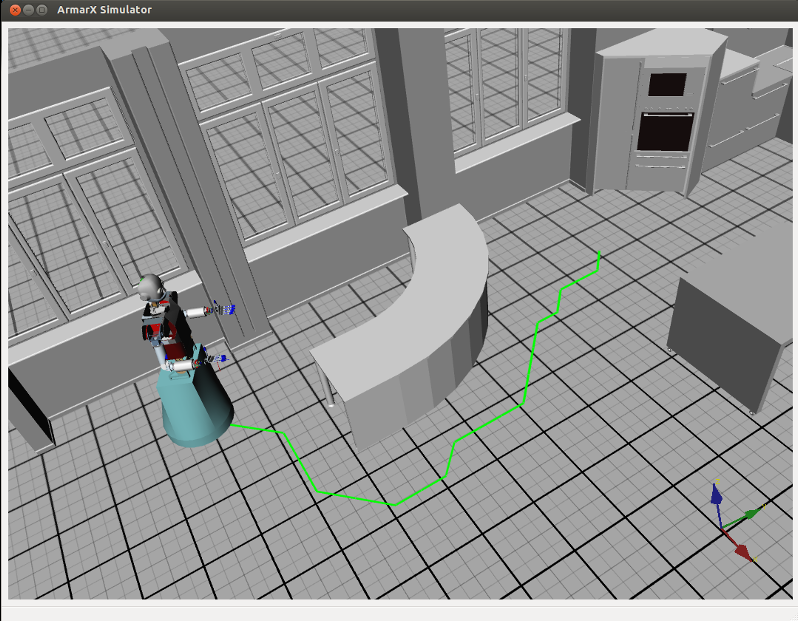
A collision-free path for Armar3.
